Дрони-безпілотники поступово стають звичайною частиною нашого життя. Але поки вони ще не почали літати по вулицях щільним трафіком, як у фантастичних фільмах, треба підготувати їх до різних ситуацій і «навчити» правилами дорожнього (і повітряного) руху. Для цих цілей інженери з Массачусетського технологічного інституту (MIT) і Швейцарської вищої технічної школи Цюріха навіть побудували макет міста — він став полігоном, на якому дослідники обкатали нову систему управління невеликими колісними квадрокоптерами.
По землі і по повітрю
Система, запропонована вченими, управляє рухом так званих гібридних дронов — безпілотників, які можуть не тільки літати, але і їздити по дорогах і тротуарах. В перспективі саме такі дрони будуть найбільш затребуваними, так як можливість польоту робить їх маневреними і швидкими, а колеса дозволяють економити енергію там, де пересуватися по повітрю необов'язково.

Але як зробити так, щоб кілька квадрокоптеров на одній ділянці і справа не стикалися один з одним? Хто стане диспетчером, дає дозвіл на зліт і посадку? Для вирішення цієї задачі був розроблений спеціальний алгоритм.
Йди своїм шляхом
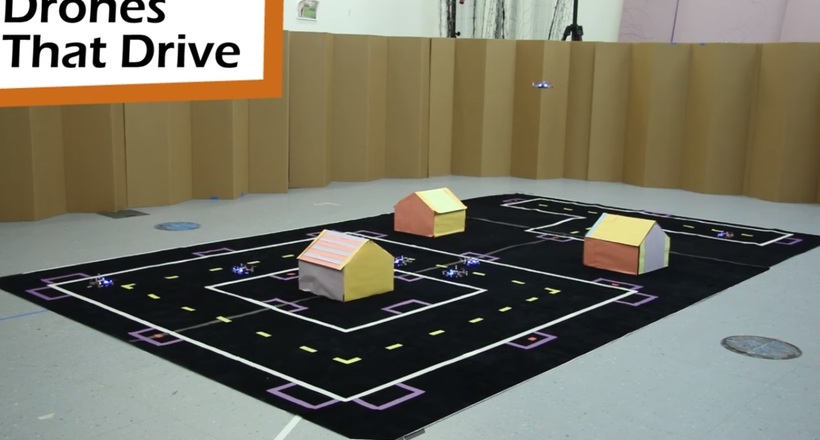
В комп'ютерному симуляторі система здатна підтримувати пересування 80 комбінованих дронов. Щоб випробувати її в реальності, а також продемонструвати її можливості, дослідники побудували макет міста, в якому одночасно пересуваються вісім безпілотників.
Система в симуляторі підтримує координоване пересування 80 дронов з коліщатками, а для демонстрації працездатності алгоритму інженери сконструювали макет міста, в якому пересуваються вісім квадрокоптеров.
Система виступає тим самим диспетчером, який уважно стежить за рухом дронов. Вона заздалегідь планує їх маршрути так, щоб вони не стикалися між собою. Далі їм залишається тільки не сходити з наміченої дороги — і ніякі аварії їм не страшні.




